
Proje #6: Işık ile kontrol edilen bir motor.
Deneme 1: Işığa bağlı direnç [LDR1], pozitiften DC motorun [M1] anotuna bağlandı; motorun katodu ise negatife bağlandı. Bu durumda M1, ışık yüksek iken çalıştı; buunun tercih edilmez olduğu anlaşıldı.
Deneme 2: PNP tranzistörlerin bir sinyali ters çevirebileceği bilindiği için PNP tranzistörler üzerinde araştırma yapıldı; tedadüf olarak ışığa bağlı direncin sinyalinin ters çevrilmesi örneği verilen bir sayfa bulundu, ancak bu devre gerçek hayatta çalışmadı.
Deneme 3: Eski tasarıma geri dönüldü; ancak LDR1 yerine 56kΩ bir direnç [R1] kullanıldı*, LDR1 ise R1in katod ucundan negatife bağlandı, M1 ile R1 arasına da ikinci bir direnç [R2] konuldu. Bu durumda M1 hiçbir zaman çalışmadı.
Deneme 4: R2 bir NPN tranzistörün [Q1] B bağlantısına bağlandı; Q1in C bağlantısı pozitife, E bağlantısı ise M1in anotuna bağlandı. dönüşünü görebilmek için M1in ucu pastel boya ile boyandı, bu sefer ise M1 kalıcı olarak çalışdı.
Deneme 5: Farklı dirençler denenmeye başlandı; ancak M1 ya asla çalışmadı, ya da kalıcı olarak çalışdı.
Deneme 6: Q1 M1den ayrıltıldı, ikinci bir NPN tranzistör [Q2] takıldı; C bağlantısı pozitife, B bağlantısı Q1in E bağlantısına, E bağlantısı ise M1in anotuna bağlandı. Bu durumda M1 kalıcı olarak çalıştı.
Deneme 7: 5. denemeyle aynı işlem yapıldı.
Deneme 8: LDR1, 5mm ışığa bağlı dirençden 12mm ışığa bağlı dirence çevrildi.
Deneme 8: LDR1e paralel bir direnç konuldu, M1 asla çalışmadı.
Deneme 9: 5./7. denemeyle aynı işlem yapıldı.
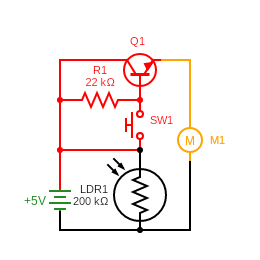
Deneme 10: Devre, 3. denemedeki haline geri çevrildi; R2 ve Q2 kaldırıldı, R1 ise deneme-yanılma 22KΩa indirildi. Bu durumda M1 aydınlıkta çalışmadı, ancak haraketsiz haldeyken başlayamadığı** için el ile destek olunması gerekti; çalışırken elin uzaklığı (ve haliyle gölgenin karanlıklık seviyesi) hızı etkiledi.
Deneme 11: Q1in B bağlantısına bir düğme [SW1] bağlanıldı, SW1in diğer ucu ise pozitife bağlanıldı.
*Multimetre ile bulunan değerler üreticinin sağladığı değerlerle karşılaştırıldı; LRD1in alt sınırın 5-10KΩ, üst sınırın ise 200KΩ olduğu bulundu. 56KΩ bu durumda mantıklı bir değer olarak seçildi.
**Bazen durduktan kısa bir süre sonra M1 kendi kendini başlatmayı başardı.
Son Şematik:
Sonuç: Sensörlerin hassasiyeti oldukça önemlidir, DC motor ve benzeri devre elemanları kendi içlerinde oldukça yüksek bir dirence sahiptir.
Bir yanıt yazın